Topic 3: Embodied Intelligence
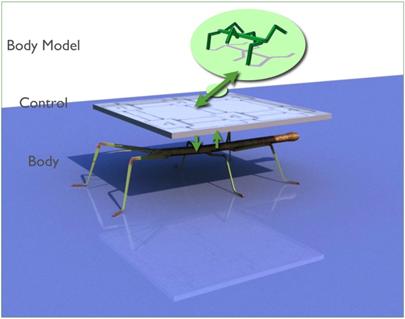
The use of a manipulable internal body model (green) will be used for planning of forthcoming movement sequences
Strategic Role
Develop theoretical concepts and associated artificial neural network implementation of an internal body representation. Develop sensor fusion scheme for integration and evaluation of distributed sensors of multiple modalities. Provide a software implementation that is applicable to the hexapod robot demonstrator.
Objectives
- How to use an internal body representation for navigation and planning ahead
- Implement sensor fusion scheme for distributed proprioceptors.
- Attempt to merge visual far-range sensing and near-range tactile sensing.
Responsible Partner
Bielefeld University, Germany
| < Prev | Next > |
|---|

