Topic 5: Biomechatronics
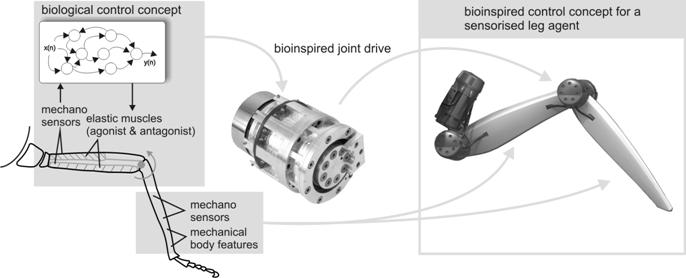
Development of a bio-inspired single-leg controller: Combine distributed proprioceptors, a neural network controller and a set of compliant actuators to model an insect-like leg.
Strategic Role
Deals with all hardware issues related to the hexapod robot demonstrator HECTOR, with particular focus on compliant actuators and sensor technology.
Objectives
- Adaptation of bio-elastic limb- and body-joint actuators and implementation of suitable control schemes.
- Development of bio-inspired limb and inter-limb controllers for whole body movements of the 22 DoF robot demonstrator HECTOR.
- Development and integration of novel, distributed mechanosensors.
- Bionic pre-processing and fusion of rich information from many sensors.
- Design of a bio-inspired, sensorised gripper for simple manipulation tasks
Responsible Partner
University of Southern Denmark, Sønderborg, Denmark
| < Prev |
|---|

